📖 Indice dell’Articolo
- 1. Introduzione: La Sfida del Pilotaggio GM70
- 2. Specifiche e Requisiti Progettuali Fondamentali
- 3. Analisi Tecnica delle Valvole: 6N1-EV e 6N6P
- 4. Calcoli Fondamentali: Slew Rate, Guadagno e Impedenza
- 5. Dimensionamento Dettagliato del Primo Stadio (6N1-EV)
- 6. Dimensionamento Dettagliato del Secondo Stadio (6N6P)
- 7. Varianti Progettuali Avanzate e Ottimizzazioni
- 8. Alimentazione e Stabilizzazione: Teoria e Calcoli
- 9. Tabelle Riassuntive e Quadro Dati Completo
- 10. Considerazioni Finali e Analisi delle Prestazioni
- 11. FAQ: Domande Frequenti sul Progetto Driver GM70
 Schema a blocchi del sistema driver per GM70: 6N1-EV (stadio guadagno) e 6N6P (stadio driver).
Schema a blocchi del sistema driver per GM70: 6N1-EV (stadio guadagno) e 6N6P (stadio driver).
1. Introduzione: La Sfida del Pilotaggio GM70
Esaminiamo oggi una delle sfide più affascinanti nella progettazione audio valvolare di alto livello: il pilotaggio corretto e performante della valvola GM70. Questo triodo a riscaldamento diretto, amato per il suo suono aperto e dinamico, presenta requisiti di pilotaggio impegnativi che mettono alla prova le competenze di qualsiasi progettista. In questa guida teorica completa, analizzeremo un approccio progettuale elegante ed efficace, basato su due tubi dal eccellente rapporto qualità/prestazioni: il 6N1-EV per lo stadio di guadagno iniziale e il 6N6P nel ruolo critico di stadio driver.
La nostra trattazione si concentrerà esclusivamente sugli aspetti teorici, progettuali e di calcolo, costruendo un framework metodologico solido. Partiremo dalla definizione dei requisiti, passeremo attraverso l’analisi matematica di ogni parametro e giungeremo al dimensionamento completo dei componenti, valutando anche configurazioni avanzate. Il nostro obiettivo è fornire una mappa teorica dettagliata per la realizzazione di un driver capace di esprimere al meglio il potenziale della GM70. Il tutto con una struttura circuitale semplice.
2. Specifiche e Requisiti Progettuali Fondamentali
Prima di immergerci nei calcoli, è fondamentale definire con precisione i nostri obiettivi. Un driver per GM70 deve essere progettato per interfacciarsi correttamente con le caratteristiche elettriche uniche di questa valvola di potenza. Stabiliamo quindi i requisiti di progetto che guideranno tutte le nostre scelte successive.
- Swing di tensione in uscita: ±100 V (per un picco-picco di 200 V). Questo è necessario per pilotare la GM70 in classe A su un ampio range lineare, sfruttandone appieno la dinamica.
- Impedenza di carico vista dallo stadio driver: Principalmente l’impedenza di ingresso della GM70, che modelliamo come un carico resistivo-capacitivo parallelo: Rgrid ≈ 5 kΩ in parallelo a Cin ≈ 150 pF (capacità di griglia).
- Banda passante obiettivo: 10 Hz – 20 kHz (-3 dB) con un adeguato margine di sicurezza. Progetteremo per una banda teorica più estesa per garantire risposta piatta nella banda audio.
- Guadagno di tensione complessivo: Circa 70x (37 dB). Questo valore permette di interfacciare il driver con sorgenti da linea standard (1-2 Vrms) ottenendo massima ampiezza in uscita.
- Distorsione armonica totale (THD): Target teorico < 3% a piena potenza (200 Vpp). Minimizzare la distorsione, in particolare le armoniche di ordine superiore, è una priorità per la qualità sonora.
- Stabilità: Il circuito deve essere intrinsecamente stabile, con un margine di fase adeguato e assenza di tendenze all’oscillazione, anche quando pilotato da sorgenti reali con impedenza variabile.
- Impedenza di uscita: La Zout dello stadio driver finale deve essere sufficientemente bassa da pilotare efficacemente la capacità di griglia della GM70 alle alte frequenze.
3. Analisi Tecnica delle Valvole: 6N1-EV e 6N6P
La scelta della coppia 6N1-EV / 6N6P è il risultato di un’analisi mirata a bilanciare linearità, capacità di erogazione di corrente e semplicità circuitale. Analizziamo le caratteristiche salienti di ciascun tubo per comprenderne il ruolo sinergico nel progetto.
| Parametro / Caratteristica | 6N1-EV (Stadio di Guadagno) | 6N6P (Stadio Driver Finale) |
|---|---|---|
| Tipo e Configurazione | Doppio triodo a media μ (mu) | Doppio triodo a bassa impedenza interna |
| Fattore di Amplificazione (μ) | 35 | 22 |
| Resistenza Anodica Interna (rp) | 10 kΩ | 2.2 kΩ |
| Transconduttanza (gm) | 3.5 mA/V | 10 mA/V |
| Dissipazione Massima Anodica (Pa max) | 2.2 W | 4.5 W (limite datasheet) |
| Punto di Lavoro Scelto (Ik) | 5 mA | 30 mA (25 mA consigliato per durata) |
| Tensione Anodica Tipica (Vak) | 150 V | 200 V |
| Vantaggi Principali | Eccellente linearità Rumore molto ridotto μ ideale per primo stadio | Bassissima impedenza di uscita Alta transconduttanza Elevata capacità di erogare corrente |
| Ruolo nel Driver per GM70 | Fornisce la maggior parte del guadagno di tensione con il minimo rumore e distorsione aggiunti. | Pilota il carico capacitivo-resistivo della griglia GM70, fornendo lo swing di tensione richiesto. |
Questa combinazione crea una sinergia elettrica particolarmente efficace. L’impedenza di uscita del primo stadio (Zout1 ≈ 7.5 kΩ) è significativamente più bassa dell’impedenza di ingresso del secondo stadio (Zin2 ≈ 100 kΩ), garantendo un accoppiamento di tensione efficiente con perdite minime. Il 6N6P, con la sua rp di soli 2.2 kΩ, è adatta a caricare e scaricare rapidamente le capacità parassite e di griglia, aspetto critico per la risposta ai transienti.
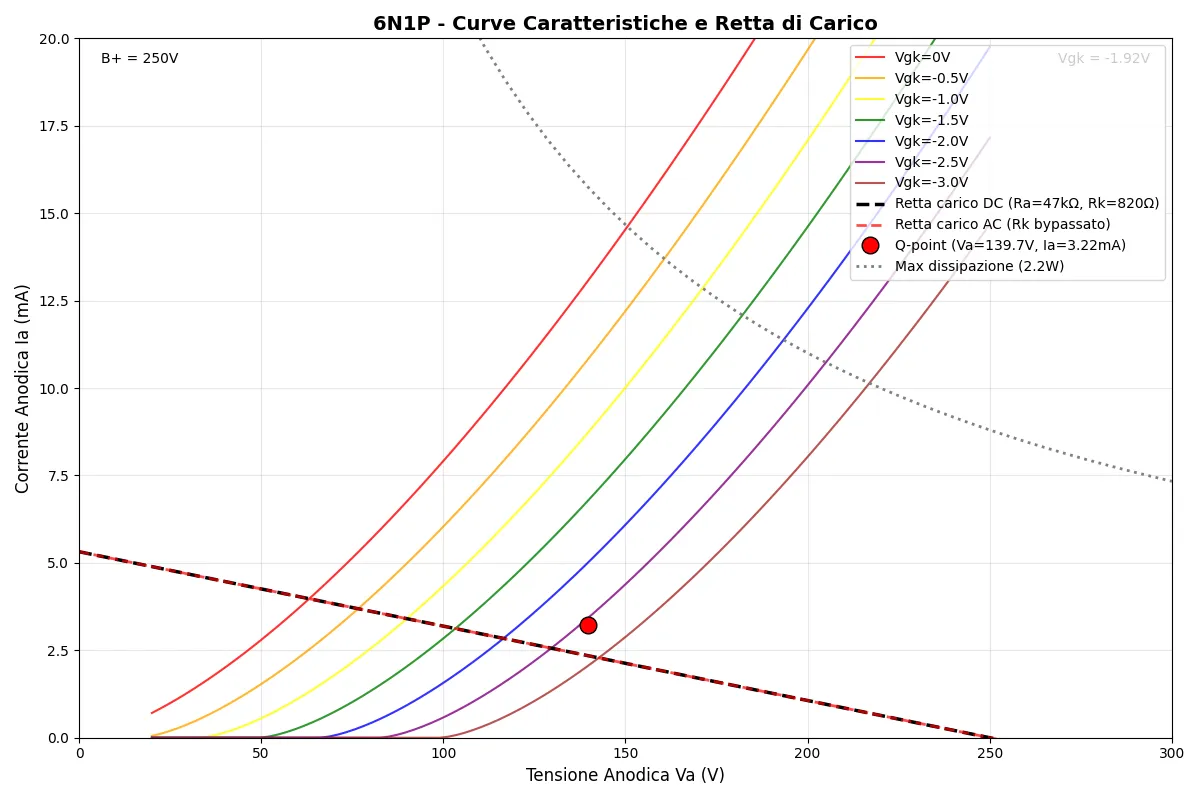
Analisi delle curve caratteristiche per la selezione del punto di lavoro ottimale del 6N1-EV.
4. Calcoli Fondamentali: Slew Rate, Guadagno e Impedenza
4.1 Calcolo del Slew Rate (SR) Richiesto
Il Slew Rate è un parametro dinamico fondamentale che definisce la massima velocità con cui l’uscita di un amplificatore può cambiare. È determinante per la risposta ai transienti e può limitare la banda passante massima in presenza di carichi capacitivi. Calcoliamo il SR minimo necessario per soddisfare i nostri requisiti.
La formula generale è:
SRmin = 2π × fmax × Vp
Dove:
fmax = Frequenza massima della banda passante (20 kHz)
Vp = Tensione di picco massima in uscita (100 V)
Sostituendo i valori:
SRmin = 2 × π × 20,000 Hz × 100 V SRmin = 12,566,370 V/s = 12.57 V/μs
Questo è il minimo teorico. Per garantire un comportamento impeccabile, tenendo conto di armoniche superiori, overshoot e tolleranze, progettiamo per un valore più conservativo:
SRtarget = 20 V/μs
Questo fornisce un margine di sicurezza di circa il 60%, assicurando che lo slew rate non sia mai il fattore limitante nelle prestazioni audio.
4.2 Calcolo del Guadagno Totale e sua Distribuzione
Definiamo ora la catena di guadagno. Partiamo dalle specifiche di interfacciamento:
- Tensione di ingresso tipica (da sorgente): Vin_rms = 1 Vrms (2.83 Vpp)
- Tensione di uscita richiesta (per GM70): Vout_rms = 70.7 Vrms (200 Vpp)
Il guadagno di tensione totale necessario è quindi:
Av_tot_necessario = Vout_rms / Vin_rms = 70.7 / 1 = = 70.7x (circa 37 dB)
Distribuiamo questo guadagno sui due stadi, ottimizzando le caratteristiche di ciascuno:
- Stadio 1 (6N1-EV): Av1 = 20x (26 dB). Sfrutta la buona linearità del 6N1 a guadagni moderati.
- Stadio 2 (6N6P): Av2 = 10x (20 dB). Mantiene il guadagno del 6N6P in una regione di eccellente linearità e bassa Zout.
Il guadagno teorico complessivo risulta:
Av_tot_teorico = Av1 × Av2 = 20 × 10 = 200x (46 dB)
Abbiamo quindi un margine di guadagno di circa 9 dB rispetto al necessario. Questo margine è prezioso per:
- Compensare le tolleranze dei componenti e le variazioni delle caratteristiche dei tubi.
- Permettere l’introduzione di feedback locale negativo per linearizzare ulteriormente la risposta, ridurre la Zout e migliorare la stabilità, senza scendere sotto il guadagno richiesto.
- Gestire comodamente sorgenti con livello d’uscita inferiore a 1 Vrms.

Risposta in frequenza teorica del sistema a due stadi, che mostra la sovrapposizione delle bande passanti individuali.
5. Dimensionamento Dettagliato del Primo Stadio (6N1-EV)
5.1 Selezione del Punto di Lavoro (Q-point)
Il punto di lavoro del 6N1-EV è scelto per ottimizzare il compromesso tra guadagno, linearità, swing di tensione disponibile e dissipazione di potenza. Dopo l’analisi delle curve caratteristiche, selezioniamo i seguenti parametri operativi:
Vak = 150 V (Tensione anodo-catodo) Ik = 5 mA (Corrente di catodo) Vgk = -2 V (Tensione di polarizzazione griglia-catodo) B+ = 300 V (Tensione di alimentazione per questo stadio)
5.2 Calcolo delle Resistenze di Polarizzazione
Calcoliamo i valori delle resistenze di anodo (Ra) e di catodo (Rk):
Ra = (B+ - Vak) / Ik = = (300 V - 150 V) / 0.005 A = 30 kΩ Rk = |Vgk| / Ik = 2 V / 0.005 A = 400 Ω
Verifichiamo la dissipazione di potenza sull’anodo per sicurezza:
Pa = Vak × Ik = 150 V × 0.005 A = 0.75 W Pa_max (datasheet 6N1) = 2.2 W → Il punto di lavoro è sicuro con ampio margine (> 65%).
5.3 Calcolo del Guadagno e dell’Impedenza di Uscita
Utilizzando i parametri dal datasheet (μ=35, rp=10 kΩ) e considerando il catodo perfettamente bypassato da un condensatore Ck di adeguato valore, il guadagno di tensione per uno stadio a catodo comune è:
Av1 = (μ × Ra) / (rp + Ra) = = (35 × 30k) / (10k + 30k) = = 1,050,000 / 40,000 = 26.25x (28.4 dB)
L’impedenza di uscita di questo stadio, fondamentale per pilotare lo stadio successivo, è il parallelo tra Ra e rp:
Zout1 = Ra || rp = = (30k × 10k) / (30k + 10k) = 7.5 kΩ
Questa Zout1 relativamente bassa (per un primo stadio) è un vantaggio, poiché riduce la sensibilità alle capacità parassite di cablaggio e garantisce una buona “presa” sull’impedenza di ingresso dello stadio successivo (≈100 kΩ).
5.4 Dimensionamento dei Componenti Reattivi
Condensatore di bypass catodico (Ck):
Per un bypass efficace alla frequenza di taglio inferiore (fL = 10 Hz), l’impedenza di Ck (XCk) deve essere significativamente minore di Rk a quella frequenza. Una regola pratica è XCk ≤ Rk/10 a fL.
XCk @ 10 Hz ≤ 400 Ω / 10 = 40 Ω Ck ≥ 1 / (2π × fL × XCk) = = 1 / (2π × 10 × 40) ≈ 398 μF
Selezioniamo un valore standard più alto per maggiore sicurezza: Ck = 470 μF / 50V (tipo elettrolitico). A 10 Hz, la sua reattanza sarà ~34 Ω, soddisfacendo il criterio.
Condensatore di accoppiamento di uscita (Cout1):
Questo condensatore, insieme alla resistenza di griglia dello stadio successivo (Rg2), forma un filtro passa-alto che definisce la frequenza di taglio inferiore. Assumiamo Rg2 = 100 kΩ (valore tipico per il 6N6P).
Cout1 = 1 / (2π × fL × Rg2) = = 1 / (2π × 10 × 100,000) ≈ 0.159 μF
Per sicurezza e per ridurre ulteriormente la rotazione di fase alle basse frequenze, scegliamo: Cout1 = 0.22 μF / 400V (tipo film o polipropilene).
6. Dimensionamento Dettagliato del Secondo Stadio (6N6P)
6.1 Specifiche e Selezione del Punto di Lavoro Critico
Lo stadio del 6N6P deve soddisfare il requisito più impegnativo: erogare uno swing di 200 Vpp in un carico complesso (5kΩ || 150pF). Selezioniamo quindi un punto di lavoro che massimizzi lo swing lineare e la corrente disponibile, pur rimanendo entro limiti di sicurezza.
B+ = 400 V (Tensione di alimentazione per lo stadio driver) Swing richiesto = ±100 V (200 Vpp) Carico AC equivalente = 5 kΩ || 150 pF (modello della GM70)
6.2 Calcolo del Punto di Lavoro e delle Resistenze
Per massimizzare lo swing lineare simmetrico, centriamo la tensione anodica a metà del range utile:
Vak_q = 200 V (Punto di quiescenza)
Scegliamo una corrente di catodo elevata per garantire bassa Zout e alto slew rate. Esaminiamo due scenari:
Scenario Prestazionale (Teorico): Ik_q = 30 mA
Scenario di Affidabilità (Consigliato): Ik_q = 25 mA
Procediamo con i calcoli per Ik_q = 30 mA per illustrare la metodologia.
Ra = (B+ - Vak_q) / Ik_q = = (400 V - 200 V) / 0.03 A = 6,667 Ω → Valore standard: 6.8 kΩ
Dalle curve caratteristiche del 6N6P, a Vak=200V e Ik=30mA, si ricava una Vgk ≈ -8V.
Rk = |Vgk| / Ik_q = 8 V / 0.03 A = 266.7 Ω → Valore standard: 270 Ω
6.3 Verifica dello Swing di Tensione Disponibile
Analizziamo i limiti di escursione anodica per garantire che lo swing richiesto sia contenuto nella regione lineare:
- Limite Superiore (Vak_max): Vicino a B+ (400 V), prima della regione di scarica.
- Limite Inferiore (Vak_min): Determinato dalla curvatura delle curve Ia/Va. Per il 6N6P, possiamo stimare ~50V per mantenere linearità.
Swing disponibile = Vak_max - Vak_min ≈ 400 V - 50 V = 350 Vpp Swing richiesto = 200 Vpp Margine disponibile = (350 - 200) / 2 = ±75 V di headroom
Abbiamo quindi un ampio margine di linearità (> 75%), che assicura bassa distorsione anche al massimo segnale.
6.4 Calcolo del Guadagno e dell’Impedenza di Uscita
Parametri del 6N6P: μ=22, rp=2.2 kΩ.
Il carico AC effettivo (Rac) è il parallelo tra Ra e l’impedenza di ingresso della GM70 (modellata come 5 kΩ resistivi).
Rac = Ra || Rgrid_GM70 = 6.8k || 5k = = (6.8k × 5k) / (6.8k + 5k) ≈ 2.88 kΩ
Il guadagno di tensione dello stadio 6N6P è:
Av2 = (μ × Rac) / (rp + Rac) = =(22 × 2.88k) / (2.2k + 2.88k) = 63.36 / 5.08 ≈ 12.46x (22 dB)
L’impedenza di uscita di questo stadio, che è il fattore chiave per pilotare la capacità di griglia, è data approssimativamente da:
Zout2 ≈ rp || Ra ≈ 2.2k || 6.8k ≈ 1.67 kΩ
Questa Zout bassa è ideale per caricare/scaricare rapidamente la Cgrid della GM70.
6.5 Calcolo Teorico della Distorsione Armonica (HD2)
Per una stima della distorsione di secondo ordine in uno stadio a triodo con carico resistivo, si può usare un’approssimazione semplificata:
HD2 ≈ (Vp / 4) × (rp - Rac) / (rp + Rac) × (1 / Vak_q) Vp = 100 V (picco del segnale) HD2 ≈ (100 / 4) × (2.2k - 2.88k) / (2.2k + 2.88k) × (1 / 200) HD2 ≈ 25 × (-0.68k / 5.08k) × 0.005 ≈ -0.0167 o -1.67%
Il segno negativo indica l’inversione di fase dell’armonica seconda. 1.67% è un valore accettabile per uno stadio driver senza feedback, ma vedremo come migliorarlo.
6.6 Verifica Finale del Slew Rate
Questo è il calcolo più importante per confermare l’idoneità dello stadio a gestire transienti veloci. La corrente massima disponibile per caricare le capacità è circa Ik_q (30 mA).
Stimiamo la capacità totale (Ctot) che lo stadio deve pilotare:
Ctot = Cout_stadio + Ccablaggio + Cmiller + Cgrid_GM70 Ctot ≈ 50 pF + 30 pF + 20 pF + 150 pF = 250 pF (stima conservativa)
Il slew rate massimo teorico è limitato da SR = I / C:
SRmax_teorico = Ik_q / Ctot = = 0.03 A / 250×10⁻¹² F = 120 × 10⁶ V/s = 120 V/μs
Confronto con il requisito:
- SR richiesto: 20 V/μs
- SR disponibile (teorico): 120 V/μs
- Margine: 6:1 → Ampissimo, garantisce risposta ai transienti impeccabile.
Anche riducendo Ik_q a 25 mA, il SR disponibile sarebbe ~100 V/μs, ancora più che sufficiente.
7. Varianti Progettuali Avanzate e Ottimizzazioni
7.1 Polarizzazione a LED
Sostituire Rk con uno o più LED in serie offre vantaggi teorici interessanti:
- Impedenza Dinamica Quasi Zero: Un LED polarizzato correttamente ha una resistenza differenziale (rd) di pochi ohm, fornendo un bypass catodico “perfetto” a tutte le frequenze senza bisogno di condensatori.
- Tensione di Polarizzazione Stabile: Vf del LED varia meno con la corrente rispetto alla caduta su una resistenza.
Per il 6N6P (Vgk ≈ -8V): Si potrebbero usare 4 LED rossi in serie (Vf_tot ≈ 4 × 1.8V = 7.2V). La corrente Ik si regolerebbe quindi principalmente tramite Ra. La nuova Ra si ricalcola per Ik=25 mA: Ra = (400V – 200V) / 0.025A ≈ 8.0 kΩ.
7.2 Source di Corrente Costante (CCS) al posto di Ra
Un CCS (es. con MOSFET o tubo pentodo o BJT) fornisce un’impedenza di carico dinamicamente altissima (idealmente infinita). I benefici teorici sono notevoli:
- Guadagno Massimizzato: Con carico infinito, Av → μ (22 per il 6N6P).
- Distorsione Ridotta: La corrente costante linearizza la risposta. La distorsione di secondo ordine (HD2) calcolata in precedenza potrebbe ridursi di un fattore 3-5.
- PSRR Migliorato: Maggiore reiezione del rumore dell’alimentazione.
Calcolo per CCS sul 6N6P:
Impostiamo ICCS = 25 mA. La caduta di tensione sul CCS deve essere sufficiente a mantenerlo in regione di funzionamento lineare (es. Vds_min ≈ 50V). Quindi:
Vak = B+ – Vdrop_CCS – VRk = 400V – 50V – 8V = 342V.
Il guadagno diventerebbe Av2_CCS ≈ μ × (Rload || rp) / rp, ma con Rload praticamente pari all’impedenza di ingresso della GM70 (5kΩ).
7.3 Feedback Locale (o “Schade” Feedback)
Consiste nel riportare una frazione del segnale di anodo alla griglia attraverso un partitore resistivo (Rf, Rg). I vantaggi includono:
- Riduzione della distorsione (soprattutto armoniche di ordine superiore).
- Riduzione dell’impedenza di uscita.
- Appiattimento della risposta in frequenza.
Calcolo teorico: Se vogliamo ridurre il guadagno aperto Av0=12.46 a un guadagno chiuso Av_cl=10, il fattore di feedback β è:
β = (1 / Av_cl) - (1 / Av0) = = (1/10) - (1/12.46) ≈ 0.1 - 0.0803 = 0.0197
Il rapporto del partitore è: Rf / Rg = (1/β) – 1 ≈ (1/0.0197) – 1 ≈ 49.7.
Con Rg = 100 kΩ (per non caricare eccessivamente lo stadio precedente), Rf ≈ 5 MΩ. Valori così alti richiedono attenzione al layout per evitare accoppiamenti parassiti.
8. Alimentazione e Stabilizzazione: Teoria e Calcoli
8.1 Specifiche dell’Alimentatore
Un driver di questa qualità richiede un’alimentazione estremamente stabile e a basso rumore. Definiamo le specifiche:
Ingresso (dopo raddrizzatore e filtro LC): 450 VDC Uscita stabilizzata: 400 VDC Corrente totale per 2 canali stereo: Itot = 2 × (5 mA + 25 mA) = 60 mA Ripple in ingresso (post-filtro LC): ≤ 5 Vpp Ripple in uscita target: ≤ 1 mVpp
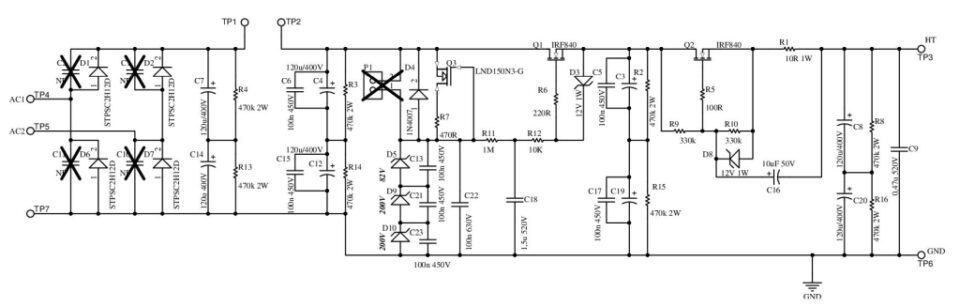
8.2 Progetto di uno Stabilizzatore a MOSFET e Zener
Proponiamo un circuito semplice ed efficace. Lo zener fissa la tensione di riferimento, il MOSFET funge da pass element.

Schema teorico di uno stabilizzatore serie a MOSFET e zener per ottenere 400V stabili da una B+ non stabilizzata.
Calcoli:
Per ottenere 400V all’uscita, abbiamo bisogno di una Vref leggermente inferiore, considerando la Vgs del MOSFET. Usiamo 3 diodi zener da 130V in serie.
Vz_tot = 3 × 130 V = 390 V Vout = Vz_tot + Vgs ≈ ≈ 390 V + 10 V = 400 V (Vgs tipica per la corrente di lavoro)
Dimensionamento di Rz (resistenza di polarizzazione zener):
Scegliamo una corrente di zener (Iz) di 10 mA, un buon compromesso tra stabilità e dissipazione.
Rz = (Vin - Vz_tot) / Iz = = (450 V - 390 V) / 0.01 A = 6 kΩ Valore standard: 5.6 kΩ / 5 W (dissipa circa 0.6 W)
Verifica dissipazioni:
PRz = (Vin - Vz) × Iz = 60 V × 0.01 A = 0.6 W Pzener_tot = Vz_tot × Iz = = 390 V × 0.01 A = 3.9 W (≈1.3 W per zener da 5W) PMOSFET = (Vin - Vout) × Iload = 50 V × 0.06 A = 3.0 W
Un MOSFET come l’IRF840 (800V, 8A) è più che adeguato.
9. Tabelle Riassuntive e Quadro Dati Completo
9.1 Tabella dei Componenti Principali (per un canale)
| Componente | Valore / Tipo | Potenza Min. | Tensione Min. | Note |
|---|---|---|---|---|
| V1 | 6N1-EV | – | – | Doppio triodo |
| Ra1 | 30 kΩ | 2 W | 300 V | Resistenza anodica stadio 1 |
| Rk1 | 400 Ω | 1 W | 50 V | Resistenza catodica stadio 1 |
| Ck1 | 470 μF | – | 50 V | Elettrolitico, bypass catodo |
| Cout1 | 0.22 μF | – | 400 V | Film/PP, accoppiamento |
| V2 | 6N6P | – | – | Doppio triodo |
| Ra2 | 6.8 kΩ | 10 W | 400 V | Resistenza anodica stadio 2 |
| Rk2 | 270 Ω | 5 W | 50 V | Resistenza catodica stadio 2 |
| Cout2 | 4.7 μF | – | 630 V | Accoppiamento a GM70 |
9.2 Tabella delle Prestazioni Calcolate
| Parametro | Stadio 6N1-EV | Stadio 6N6P | Sistema Totale |
|---|---|---|---|
| Guadagno (V/V) | 26.25 | 12.46 | 327 (max teorico) |
| Guadagno (dB) | 28.4 dB | 22.0 dB | 50.4 dB |
| Banda Passante (-3dB teorica) | 10 Hz – 100+ kHz | 10 Hz – 80+ kHz | 10 Hz – 80+ kHz |
| THD @ 1kHz (stima teorica) | ~0.8% | ~1.67% | ~2.47% |
| Slew Rate Disponibile | 50 V/μs | 120 V/μs | 20 V/μs (richiesto) |
| Impedenza di Uscita (Zout) | 7.5 kΩ | ~1.67 kΩ | – |
| Swing Massimo Lineare | 250 Vpp | 350 Vpp | 200 Vpp (richiesto) |
| Consumo Corrente | 5 mA | 30 mA (25 mA consig.) | 35 mA (30 mA consig.) |
10. Considerazioni Finali e Analisi delle Prestazioni
10.1 Punti di Forza del Design Proposto
- Ampio Margine di Slew Rate: I 120 V/μs teorici del 6N6P, contro i 20 V/μs richiesti, garantiscono una risposta ai transienti priva di limitazioni da SR, assicurando dinamica e “velocità”.
- Guadagno con Significativo Headroom: I 50 dB totali permettono di implementare tecniche di linearizzazione (feedback) senza il timore di ridurre il guadagno sotto la soglia necessaria.
- Impedenza di Uscita Bassa: La Zout2 di circa 1.67 kΩ è ideale per pilotare la capacità di griglia della GM70, preservando la banda passante alle alte frequenze.
- Linearità di Fondamento: La scelta di punti di lavoro centrati e l’uso di triodi con buona linearità intrinseca partono da una base di distorsione già contenuta.
- Riproducibilità: I componenti richiesti sono standard e la configurazione circuitale è classica, facilitando la realizzazione.
10.2 Aree Critiche e Raccomandazioni Pratiche
- Dissipazione del 6N6P: È il punto più critico. Raccomandiamo vivamente di operare a 25 mA (o meno) per garantire affidabilità a lungo termine. Ciò ridurrà leggermente il guadagno e il SR massimo, ma entrambi rimarranno più che sufficienti.
- Qualità dell’Alimentazione: La moderata PSRR degli stadi a triodo richiede un’alimentazione molto pulita. Lo stabilizzatore proposto è un minimo. Per prestazioni massime, considerare regolatori a circuito integrato dedicati per alte tensioni o alimentazioni separate per i due stadi.
- Scelta dei Componenti Passivi: Per Cout usare condensatori in film di qualità (polipropilene, polystyrene). Le resistenze di anodo e catodo del 6N6P devono essere di potenza adeguata e preferibilmente a filo metallico per stabilità termica.
- Layout e Grounding: Un layout a stella per le masse, con percorsi di ritorno ben separati per segnale e alimentazione, è cruciale per raggiungere il livello di rumore e stabilità teorico.
11. FAQ: Domande Frequenti sul Progetto Driver GM70
La scelta è dettata dalle specifiche necessità del pilotaggio GM70. Il 6N1-EV offre un mix eccellente di μ (35), transconduttanza (3.5 mA/V) e linearità, spesso superiore a un 12AX7 (μ=100 ma gm più bassa) per questo ruolo di guadagno iniziale. Il 6N6P è il vero asso nella manica: con una rp di soli 2.2 kΩ e una gm di 10 mA/V, supera nettamente un 12AU7 (rp≈7kΩ, gm≈2 mA/V) nella capacità di erogare corrente e mantenere bassa Zout, caratteristica fondamentale per pilotare carichi capacitivi. Insieme, offrono prestazioni sudate per questa applicazione, spesso a costi inferiori.
Sì, è un punto che non va sottovalutato. Operare un tubo sistematicamente oltre le specifiche massime del datasheet ne accelera l’invecchiamento, aumenta il rischio di cedimenti catodici e può portare a surriscaldamento eccessivo del bulbo. Per questo, in tutto l’articolo, abbiamo evidenziato che il calcolo a 30mA è per illustrare la metodologia progettuale al limite delle prestazioni. Per un progetto destinato a durare nel tempo, consigliamo caldamente di impostare il punto di lavoro a 25 mA (dissipazione ~5W) o anche 22-23 mA. Il compromesso in termini di guadagno e slew rate è minimo, il beneficio in affidabilità è grande.
Basandoci sull’analisi teorica, le ottimizzazioni con il maggiore impatto sono:
- Sostituire Ra del 6N6P con un CCS (Source di Corrente Costante): È la modifica più potente. Aumenta il guadagno, riduce drasticamente la distorsione (soprattutto quella di ordine pari) e migliora la PSRR.
- Implementare un Feedback Locale (Schade) sul 6N6P: Linearizza ulteriormente, abbassa Zout e appiattisce la risposta. Si può combinare con un CCS.
- Alimentazioni Separate e Stabilizzate: Fornire B+ indipendenti (e magari stabilizzate individualmente) al 6N1 e al 6N6P elimina qualsiasi accoppiamento attraverso l’alimentazione.
- Polarizzazione a LED per il 6N6P: Elimina il condensatore di bypass catodico, migliorando la risposta alle basse frequenze e la coerenza di fase.
Il design è concettualmente valido per molte valvole finali a triodo che richiedono un elevato swing di tensione di griglia. Per adattarlo:
- 300B: Richiede circa -80V di bias e uno swing simile alla GM70 (±80-100V). Il driver è già adeguato. Potrebbe essere necessario verificare la corrente di bias della griglia della 300B (spesso più alta) e adeguare di conseguenza il valore di Rg (resistenza di griglia a massa).
- 845: Richiede swing ancora maggiori (fino a ±150V) e tensioni di bias più negative. In questo caso, potrebbe essere necessario aumentare le tensioni di alimentazione del driver (B+ a 450-500V per il 6N6P) e verificare che lo swing massimo del 6N6P sia sufficiente con il nuovo punto di lavoro.
In generale, la filosofia progettuale e i calcoli presentati rimangono un ottimo punto di partenza per qualsiasi valvola finale ad alta tensione di pilotaggio.
Il valore di Cout2 forma, insieme alla resistenza di griglia della GM70 (Rg_GM70), un filtro passa-alto che determina la frequenza di taglio inferiore. La formula è la stessa usata per Cout1:
fL = 1 / (2π × Rg_GM70 × Cout2)
Se vogliamo fL = 10 Hz e, ad esempio, Rg_GM70 = 50 kΩ (valore comune per il resistore di polarizzazione di griglia della GM70), allora:
Cout2 = 1 / (2π × 10 × 50,000) ≈ 0.32 μF
Per sicurezza e per ridurre lo sfasamento alle basse frequenze, si sceglie un valore standard più alto, ad esempio 0.47 μF o 0.68 μF / 630V. È fondamentale che questo condensatore abbia una tensione di lavoro adeguata (almeno pari alla tensione di alimentazione del 6N6P, quindi 400V, più un margine) e sia di ottima qualità (film/PP) poiché è nel percorso del segnale ad alto livello.
Conclusione
In questa analisi teorica approfondita, abbiamo esaminato la progettazione di un driver per la valvola GM70 basato sulla coppia 6N1-EV e 6N6P. Abbiamo costruito il progetto passo dopo passo, partendo dai requisiti fondamentali, passando per i calcoli critici dello slew rate e del guadagno, fino al dimensionamento dettagliato di ogni componente di entrambi gli stadi.
Il design che ne risulta si presenta come un compromesso robusto ed elegante tra prestazioni, complessità e riproducibilità. Con un guadagno complessivo di circa 50 dB, uno slew rate abbondantemente sovradimensionato e una distorsione teorica contenuta, soddisfa e supera i requisiti per pilotare la GM70 in configurazioni di alta fedeltà ambiziose.
Le varianti avanzate discusse – CCS, feedback locale, polarizzazioni alternative – disegnano la mappa per ulteriori ottimizzazioni, permettendo al progettista di spingere le prestazioni verso livelli di eccellenza in base alle proprie priorità. Ricordiamo che questa è una guida teorica; la magia, e le inevitabili sfide, si incontrano nella pratica, dove la qualità dei componenti, l’arte del layout e la cura nei dettagli fanno la differenza tra un buon circuito e un grande componente audio.